Padėties arba apsisukimo kampo davikliai - enkoderiai
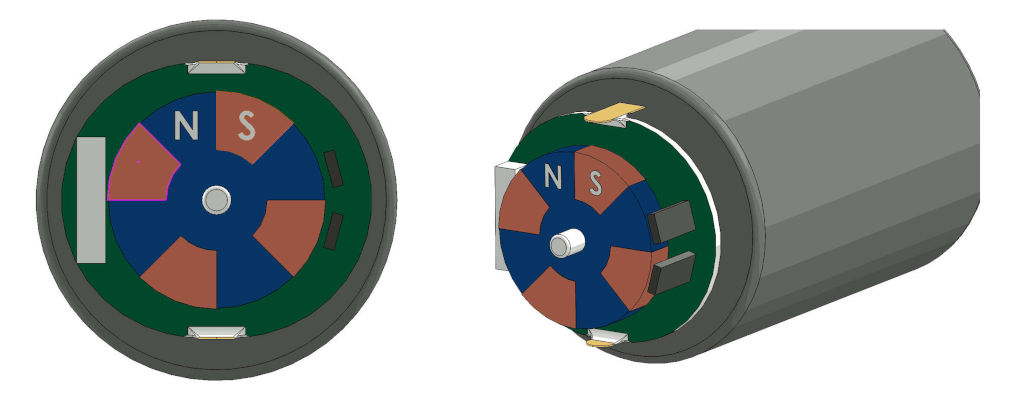
Padėties davikliai yra sukamieji kodavimo įrenginiai, naudojantys jutiklius, kad nustatytų besisukančio įmagnetinto rato magnetinio lauko pokyčius arba perforuoto disko optinius impulsus.
Padėties daviklis yra naudojmaas variklio padėties ir greičio informacijai gauti. Informacija nuskaitoma dviejų A ir B kanalų pagalba. Enkoderis formuoja dviejų fazių kvadratinį signalą ( quadrature encoder signal ). Kvadratinio signalo fazės postūmio kampas AB kanaluose yra maždaug 90 laipsnių.
Kai ratas arba žiedas sukasi pro magnetinį jutiklį, poliai sukelia nuspėjamą jutiklio atsaką, pagrįstą magnetinio lauko stiprumu. Magnetinis atsakas tiekiamas per signalo apdorojimo elektros grandinę ir išvedamas kaip skaitmeninis signalas į valdymo įrenginį.
Įmagnetintų polių porų skaičius ant rato poliaus, jutiklių skaičius ir elektros grandinės tipas veikia kartu, kad nustatytų magnetinio kodavimo įrenginio skiriamąją gebą.
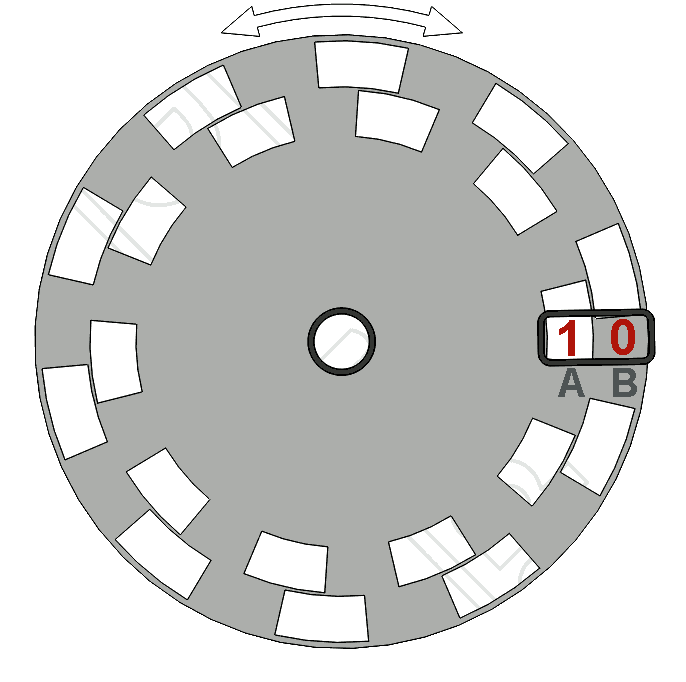
Optinio padėties jutiklio diskas
Valdymo įrenginyje stačiakampių impulsų signalas ( quadrature encoder signal ) paverčiamas į poziciją išreikštą vienetais.
Matavimo vienetas gali būti žingsnis, jei tai absoliuti reikšmė arba impulsų skaičius vienam apsisukimui ( ppr - pulses per rotation ) jei norima išmatuoti variklio pasisukimo kampą.
 Dekoduotas signalas naudojamas variklio valdiklyje kaip grįžtamasis ryšys variklio valdymui.
Dekoduotas signalas naudojamas variklio valdiklyje kaip grįžtamasis ryšys variklio valdymui.
Populiariaus yra optiniai ir magnetiniai ekoderiai.
Paprastai optiniai enkoderiai būna aušktesnės skiriamosios gebos o magnetiniai enkoderiai pasžymi didesniu atsparumu aplinkos poveikiams, lyginant maždaug panašaus sudėtingumo daviklius.
Padėties jutiklių pritaikymas
Vienu metu atliekant variklio pozicijos ir vartojamos galios / srovės matavimus variklis gali būti valdomas keletu algoritmų.
- Pozicionavimo: kada variklis stengiasi išlaikyti užduotą poziciją.
- Greičio stabilizavimo: kai variklis sukasi stabiliu fiksuotu greičiu nepriklausomai nuo mechaninės apkrovos.
- Jėgos ribojimo: kada pasipriešinimo jėga visada yra vienoda.
Praktikoje aukščiau minėti algotimai gali būti naudojami kartu įvairiomis kombinacijomis, pvz robotas turi fiksuotu greičiu nuvažiuoti X metrų atstumą iš taško A į tašką B
arba
variklis turi pasisukti į užduotą poziciją neviršydamas tam tikros jėgos (spyruoklės režimas). .
Hall efekto magnetinio lauko davikliai
Holo efekto jutiklį sudaro puslaidininkinės medžiagos sluoksnis, prijungtas prie maitinimo šaltinio. Kai magnetinis polius ant rato ar žiedo praeina pro Holo efekto jutiklį, sąveika sukuria įtampos pokitį. Magnetinio pokyčio amplitudė ir / ar dažnis yra naudojami greičiui ir poslinkiui nustatyti.
Egzistuoja Holo efekto magnetiniai jutikliai integruoti į procesoriaus lustą, todėl yra daug kompaktiškesni nei atskiri magnetinio lauko matavimo jutikliai Integruoti magnetiniai jutikliai paprastai turi didesnė skiriamąją gebą ir gali būti sujungiami į masyvus, kad būtų galima išplėsti išmatuojamą diniaminį diapazoną suvidurkinant klaidas ir padidinant jautrumą.
Kam naudojami magnetiniai kodavimo įrenginiai?
Magnetinis kodavimo įrenginys sukurtas patikimam skaitmeniniam grįžtamajam ryšiui perduoti sudėtingose ekspoatacijos sąlygose ir /arba pavojingoje aplinkoje. Skirtingai nuo optinių kodavimo įrenginių, kuriuose optinio kodo diską gali užteršti nešvarumai ar drėgmė, magnetiniai kodavimo įrenginiai naudoja magnetinių laukų pokyčius kaip aptikimo metodą, todėl jie yra daug patikimesni užterštoje aplinkoje.
Magnetiniai kodavimo įrenginiai puikiai tinka tais atvejais, kai reikalingas platus temperatūrinis diapazonas, padidintas atsparumas smūgiams ir vibracijai tuo pačiu užtikrinant išvesties signalo patikimumą.